以下为个人学习笔记和习题整理
课程:计算机图形学
教材:计算机图形学基础(第 3 版) 陆枫 何云峰 编著
# 第五章习题
# 习题 5.11
如图 5-67 所示多边形,若采用扫描转换算法 (改进的有效边表算法)进行填充,试写出该多边形的 ET 表和当扫描线 y=4 时的有效边表 (AET 表,活性边表)
![]()
![]()
# 第六章习题
# 习题 6.7
# 题目
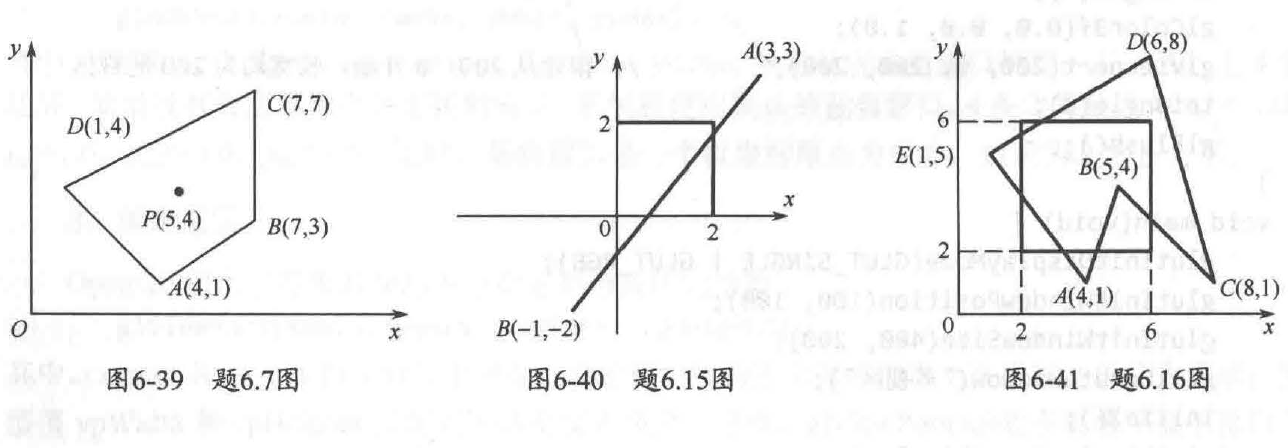
如图 6-39 所示四边形 ABCD, 求绕 P (5, 4) 点分别旋转 45° 和 90° 的变换矩阵,并求出各端点的坐标,画出变换后的图形。
![]()
# 解答
- 先求变换矩阵
T=⎣⎢⎡10−501−4001⎦⎥⎤⋅⎣⎢⎡cos90∘−sin90∘0sin90∘cos90∘0001⎦⎥⎤⋅⎣⎢⎡105014001⎦⎥⎤=⎣⎢⎡0−1910−1001⎦⎥⎤
- 求各点变换后的坐标
⎣⎢⎢⎢⎡477113741111⎦⎥⎥⎥⎤⋅⎣⎢⎡0−1910−1001⎦⎥⎤=⎣⎢⎢⎢⎡862536601111⎦⎥⎥⎥⎤
变换后的坐标为:A′(8,3),B′(6,6),C′(2,6),D′(5,0)
- 绘制变换后的图形

# 习题 6.11
# 题目
试用编码裁剪法裁剪如图 6-40 所示线段。
![]()
# 解答
端点 A:code1=1010,端点 B:code2=0101
- 既不满足code1∣code2=0,也不满足code1&code2=0
端点 A 在窗口外,按顺序从低位开始检测
倒数第 2 位为 1,因此计算与右边界的交点
直线段的斜率为:k=x2−x1y2−y1=1.25
右边界交点的 y 坐标为:y=y1+k(x−x1)=1.75
右边界交点的坐标为(2,1.75),代替端点 A,code1=0000 - 此后线段同样不满足上述 2 个条件,A 在窗口内,将 A、B 交换,按位检测code1=0101
最后 1 位为 1,计算与左边界的交点为(0,−0.75),代替端点 A,code1=0100 - 仍不满足 2 个条件,A 在窗口外,按位检测code1=0100
第 2 位为 1,计算与下边界的交点为(0.6,0),代替端点 A 后,code1=0000
满足code1∣code2=0,可 “简取”,最终裁剪线段为(0.6,0),(2,1.75)
# 习题 6.15
# 题目
试用 Sutherland-Hodgman 算法对如图 6-41 所示的多边形进行裁剪,要求画出每次裁剪对应的图形,并标明输入和输出的顶点。
![]()
# 解答




- 用左⬅️边界裁剪
输入 ABCDE
输出 12ABCD - 用下⬇️边界裁剪
输入 12ABCD
输出 1234B56D - 用右➡️边界裁剪
输入 1234B56D
输出 1234B7D - 用上⬆️边界裁剪
输入 1234B7D
输出 1234B789
# 习题 6.16
# 题目
试用 Weiler-Atherton 算法对如图 6-41 所示的多边形进行裁剪,要求写出每步裁剪的结果,并标明输入和输出的顶点,并与 6.15 题得到的裁剪结果进行比较。
省略了与 Sutherland-Hodgeman 算法的比较
![]()
# 解答
![]()
从 A 出发,按逆时针方向处理顶点
- AB 段,输出V1B
- BC 段,可见侧进入不可见侧,输出BV2,逆时针方向最近交点为V3,输出V2V3
- CD 段,不输出
- DE 段,输出V3V4,转向,输出V4V5
- EA 段,输出V5V6,转向,输出V6V1
# 第七章习题
# 习题 7.5
# 题目(第 1 问)
求将图 7-41 中空间四面体进行关于 P 点整体放大 2 倍的变换矩阵,写出复合变换后图形各顶点的规范化齐次坐标。
![]()
# 解答
- 先求变换矩阵
T=⎣⎢⎢⎢⎡100−20102001−20001⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡10000100001000021⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡1002010−200120001⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡100−10101001−100021⎦⎥⎥⎥⎤
- 求各点变换后的规范化齐次坐标
⎣⎢⎢⎢⎡2201011100011111⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡100−10101001−100021⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡11−101222−1−1−1021212121⎦⎥⎥⎥⎤
A′(2,2,−2,1),B′(2,4,−2,1),C′(−2,4,−2,1),D′(0,4,0,1)
# 习题 7.7
# 题目
作出图 7-41 中空间四面体三视图,要求写清变换式(平移矢量均为 1)。
![]()
# 解答
- 主视图
⎣⎢⎢⎢⎡2201011100011111⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡1000000000100001⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡2201000000011111⎦⎥⎥⎥⎤
- 俯视图
⎣⎢⎢⎢⎡2201011100011111⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡100000000−10−10001⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡22010000−1−2−2−21111⎦⎥⎥⎥⎤
- 侧视图
⎣⎢⎢⎢⎡2201011100011111⎦⎥⎥⎥⎤⋅⎣⎢⎢⎢⎡0−10−1000000000001⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡−1−2−2−2000000011111⎦⎥⎥⎥⎤
- 三视图如下:
![]()